Pathfinding: A*
Introducción
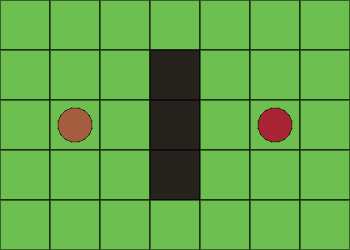
La búsqueda de caminos (pathfinding) es uno de mis problemas favoritos de todos los tiempos y una de las cosas que más he disfrutado programando; por un montón de razones… La primera, es que los humanos creemos erróneamente que es algo que hacemos muy bien, y sólo cuando nos comparamos con una máquina tomamos consciencia de cómo únicamente logramos buenos resultados en entorno sencillos. Por ejemplo, en la imagen siguiente, si estamos en la casilla del círculo marrón y tenemos que ir a la casilla del círculo rojo; y las casillas grises representan un muro, ninguno tenemos problema en esquivar el muro y trazar el camino más corto hacia nuestro destino: la casilla del círculo rojo.
Sin embargo, en la vida real, al conducir o pasear por la calle, no calculamos los caminos entre origen y destino de forma tan matemática como pensamos, y nos dejamos llevar por las anchuras de las avenidas, otros caminos que ya conocemos, la cantidad de luz de una calle, etc. El resultado es que nosotros siempre nos sentimos 100% satisfechos con el camino que hemos elegido, pero muy rara vez este camino es el óptimo; ni el más corto, ni el más rápido.
Me gusta además su enorme utilidad, tendremos que diseñar una solución al problema en cualquier entorno con agentes inteligentes, sistemas robóticos, videojuegos, etc. Y, además, a pesar de su enunciado sencillo, rara vez a los programadores que se enfrentan al problema por primera vez se les ocurre alguna solución que no esté basada en backtracking.
La solución “universal” que durante muchos años ha servido de guía a este problema es el algoritmo A-Estrella (escrito A*). Un algoritmo muy sencillo que ofrece buenos resultados, y ha estado presente en casi todas las aplicaciones de búsqueda de caminos desde el principio de los tiempos hasta la última década.
Vamos a describir en qué consiste y luego lo implementaremos en Javascript.
Desglose y trazas: A*
El problema inicial, como hemos visto, trata de trazar el camino para ir del punto A (círculo marrón) al punto B (círculo rojo).
Idea general:
La primera operación a realizar, es dividir el espacio en casillas. En nuestro ejemplo las casillas son cuadradas, pero realmente podremos adaptar el algoritmo a dividir el espacio de la forma que deseemos (triángulos, hexágonos, etc). A partir de ahora cada casilla será una celda espacial (crearemos una estructura de datos que la represente) relacionada con sus adyacentes y con su “padre”; el padre será la celda por la cual hemos llegado a tener en cuenta a la actual como posible candidata a formar parte del camino final.
Aspectos:
1) Tener dos listas de celdas; una abierta y una cerrada. En la lista abierta iremos introduciendo celdas que tenemos que evaluar, para ver si son buenas candidatas a formar parte del camino final. En la lista cerrada introduciremos las celdas ya evaluadas.
2) La evaluación de las celdas se hace en base a dos factores: la longitud del camino más corto para llegar desde el punto de origen a la celda actual, y la estimación del camino más corto que podría quedar para llegar al destino. La estimación para el destino se hace usando una función heurística, en concreto se suele usar la Distancia Manhattan, que esencialmente consiste en contar cuantas celdas nos separan del destino vertical y horizontalmente, sin movimientos diagonales; como si estuviéramos recorriendo manzanas en una gran ciudad y no pudiéramos atravesarlas, sólo bordearlas; de ahí viene el nombre.
Algoritmo
Paso 0 Añadimos la celda origen a la lista abierta.
Paso 1 Cogemos el primer elemento de la lista abierta y lo sacamos y lo insertamos en la lista cerrada.
Paso 2 Cogemos las celdas adyacentes a la celda extraída.
Paso 3 Para cada celda adyacente:
A) Si la celda es la celda destino, hemos terminado. Recorremos inversamente la cadena de padres hasta llegar al origen para obtener el camino.
B) Si la celda representa un muro o terreno infranqueable; la ignoramos.
C) Si la celda ya está en la lista cerrada, la ignoramos.
D) Si la celda ya está en la lista abierta, comprobamos si su nueva G (lo veremos más adelante) es mejor que la actual, en cuyo caso recalculamos factores (lo veremos más adelante) y ponemos como padre de la celda a la celda extraída. En caso de que no sea mejor, la ignoramos.
E) Para el resto de celdas adyacentes, les establecemos como padre la celda extraída y recalculamos factores. Después las añadimos a la lista abierta.
Paso 4 Ordenamos la lista abierta. La lista abierta es una lista ordenada de forma ascendente en función del factor F de las celdas.
Paso 5 Volver al paso 1.
Factores
Cada celda va a tener 3 factores. G, H y F.
– G: Es el coste de ir desde la celda origen a la celda actual. Cada vez que nos movamos un paso en horizontal o vertical, añadiremos 10 puntos de coste. Cada vez que nos movamos en diagonal, añadiremos 14. ¿Por qué 14? Porque aunque geométricamente la proporción exacta debería ser 14.14213 {sqrt(10*10+10*10)}, 14 es una buena aproximación entera que nos hará ganar velocidad al evitar el uso de coma flotante (nota: en javascript en realidad esta mejora no se aplica, ya que todos los números se tratan como floats internamente).
– H: Es la distancia mínima y optimista, sin usar diagonales, que queda hasta el destino. La heurística basada en Distancia Manhattan de la que hemos hablado antes.
– F: Es la suma de G y H.
Traza explicada
Iteración 1
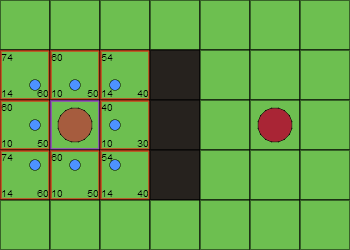
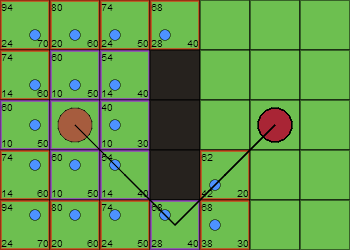
Tras la primera iteración, la celda origen queda en la lista cerrada (border violeta). Las adyacentes quedan en la lista abierta (borde rojo). Las celdas tienen sus tres valores G, H y F calculados. La F aparece en la esquina superior izquierda de cada celda. La G en la inferior izquierda. La F en la inferior derecha.
Además cada celda tiene una bolita azul que indica qué celda es su padre, tras esta iteración, todas las celdas de la lista abierta tienen como padre a la celda origen.
Iteración 2
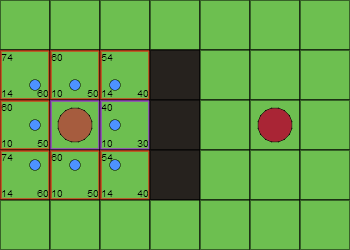
En esta iteración hemos añadido la celda a la derecha (la de menor F de la lista abierta) de la celda origen a la lista cerrada (borde violeta). No se han producido más cambios.
Iteración 3
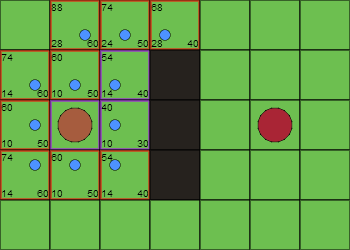
Se añade la celda superior derecha desde el origen a la lista cerrada (es la de menor F de la lista abierta) y se añaden las adyacentes que no estaban ya.
Iteración N
Y algoritmo sigue. De forma sencilla, hasta alcanzar el objetivo:
Ejecución de traza interactiva I
Podéis ejecutar el algoritmo paso a paso haciendo clic en la imagen inicial siguiente. Cada clic equivale a una iteración:
Ejecución de traza interactiva II
Vamos a darle más juego al algoritmo. Podemos añadir fácilmente tipos de terrenos con diferentes costes a la hora de transitarlos. En el siguiente ejemplo vamos a usar los siguientes tipos de terreno:
– Césped (verde claro): Movimiento al 100%
– Bosque (verde oscuro): Movimiento al 75% de la velocidad normal
– Agua (azul claro): Movimiento al 50% de la velocidad normal
– Agua profunda (azul oscuro): Movimiento al 10% de la velocidad normal
– Muro (gris): Infranqueable (0% de velocidad)
– Puente de madera (marrón): Movimiento al 90% de la velocidad normal
El escenario es el siguiente:
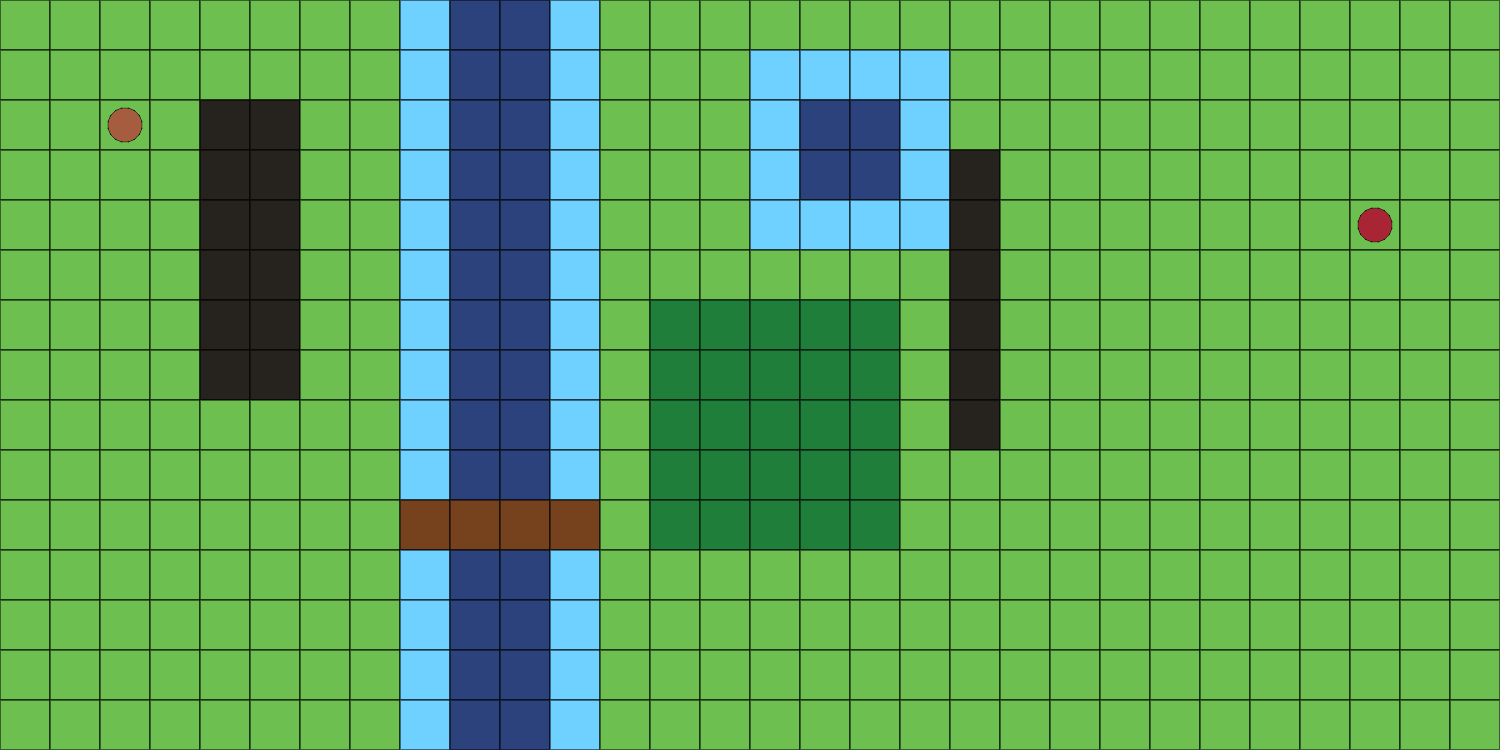
Y el resultado (clic en la imagen para ampliar):

Podéis ejecutarlo paso a paso en la siguiente simulación (tened en cuenta que habrá interacciones vacías que sólo eliminan nodos). Cada clic en el mapa será una iteración.
Y por último… lo más importante; el código 😉
Como siempre, si tenéis cualquier duda, preguntadme 🙂
Os recomiendo leerlo despacio y entenderlo (es muy sencillo y claro). Se lee bien.
function Map(width, height, cell_size, canvas)
{
//-- init
this.width=width || 10;
this.height=height || 10;
this.cell_size=cell_size || 50;
canvas.width=this.width*this.cell_size;
canvas.height=this.height*this.cell_size;
this.ctx=canvas.getContext("2d");
this.origin=0x0;
this.destiny=0x0;
//-- inside globals
var map=this;
var ctx=this.ctx;
//-- members
this.cells=[];
var terrains=[
{awkwardness:1.00, color:"#6DBF50", name:"ground"},
{awkwardness:0.75, color:"#1F7F3A", name:"forest"},
{awkwardness:0.50, color:"#6FD1FF", name:"water"},
{awkwardness:0.10, color:"#2B427D", name:"deep_water"},
{awkwardness:0.00, color:"#26221E", name:"wall"},
{awkwardness:0.90, color:"#76421E", name:"bridge"}
];
// -- allow external access by name (like map.terrain.water...)
(function indexTerrains()
{
map.terrains={};
for(var i=0;i<terrains.length;i++)
map.terrains[terrains[i].name]=terrains[i];
}());
//-- utils
this.randTerrain=function()
{
var index=Math.floor(Math.random()*terrains.length-0.2);
return terrains[index>0?index:0];
}
this.drawFlag=function(x,y,color)
{
var x=x*this.cell_size+this.cell_size/2;
var y=y*this.cell_size+this.cell_size/2;
ctx.save();
ctx.fillStyle=color;
ctx.strokeStyle="#000";
ctx.beginPath();
ctx.arc(x,y,this.cell_size/3,0,2*Math.PI);
ctx.stroke();
ctx.fill();
ctx.restore();
}
//-- private classes
function Cell(x, y)
{
this.G="";
this.H="";
this.F=this.G+this.H;
this.x=x;
this.y=y;
this.list=0x0;
this.dad=0x0;
this.terrain=map.randTerrain();
this.drawDad=function(x,y)
{
ctx.save();
ctx.fillStyle="#4D92FF";
ctx.strokeStyle="#000";
ctx.beginPath();
ctx.arc(x,y,map.cell_size/10,0,2*Math.PI);
ctx.stroke();
ctx.fill();
ctx.restore();
}
this.render=function()
{
ctx.save();
ctx.fillStyle=this.terrain.color;
ctx.strokeStyle="#000";
ctx.fillRect(0,0,map.cell_size, map.cell_size);
ctx.strokeRect(0,0,map.cell_size, map.cell_size);
//Draw data
ctx.fillStyle="#000";
ctx.font = "10px Arial";
ctx.textAlign="start";
ctx.textBaseline="top";
ctx.fillText(this.F,1,1);
ctx.textBaseline="bottom";
ctx.fillText(this.G,1,map.cell_size);
ctx.textAlign="end";
ctx.fillText(this.H,map.cell_size-1,map.cell_size);
//Draw list
if(this.list)
{
ctx.strokeStyle=this.list=="open"?"#F00":"#a0F";
ctx.strokeRect(1,1,map.cell_size-2, map.cell_size-2);
}
//Draw dad
if(this.dad)
{
var offset=(map.cell_size/10)*3;
var x=offset;
var y=offset;
if(this.dad.x==this.x)
x=map.cell_size/2;
if(this.dad.x>this.x)
x=map.cell_size-offset;
if(this.dad.y==this.y)
y=map.cell_size/2;
if(this.dad.y>this.y)
y=map.cell_size-offset;
this.drawDad(x,y);
}
ctx.restore();
}
}
//-- constructor
for(var i=0;i<this.width;i++)
{
this.cells[i]=[];
for(var j=0;j<this.height;j++)
this.cells[i].push(new Cell(i,j));
}
//--methods
this.render=function()
{
for(var i=0;i<this.width;i++)
{
for(var j=0;j<this.height;j++)
{
ctx.save();
ctx.translate(i*this.cell_size,j*this.cell_size);
this.cells[i][j].render();
ctx.restore();
}
}
if(this.origin)
this.drawFlag(this.origin.x,this.origin.y,"#A65C3E");
if(this.destiny)
this.drawFlag(this.destiny.x,this.destiny.y,"#A92535");
}
this.fill=function(terrain, skip_render)
{
for(var i=0;i<this.width;i++)
for(var j=0;j<this.height;j++)
this.cells[i][j].terrain=terrain;
if(!skip_render)
this.render();
}
this.rect=function(terrain, x, y, w, h, skip_render)
{
for(var i=x;i<x+w;i++)
for(var j=y;j<y+h;j++)
this.cells[i][j].terrain=terrain;
if(!skip_render)
this.render();
}
this.addTerrain=function(terrain)
{
terrains.push(terrain);
indexTerrains();
}
this.getAdjacentCells=function(cell)
{
var adjacent_cells=[];
for(var i=cell.x-1;i<=cell.x+1;i++)
{
for(var j=cell.y-1;j<=cell.y+1;j++)
{
try
{
if(this.cells[i][j] && !(i==cell.x && j==cell.y))
adjacent_cells.push(this.cells[i][j]);
}
catch(ex) {}
}
}
return adjacent_cells;
}
}
function Pathfinding(map)
{
//OpenList class
function OpenList()
{
var cells=[];
this.add=function(cell)
{
cell.list="open";
cells.push(cell);
}
this.getFirst=function()
{
var first=cells.splice(0,1)[0];
return first;
}
this.sort=function()
{
cells.sort(function(a,b) {return a.F-b.F;});
}
this.contains=function(cell)
{
return cells.indexOf(cell)<0?false:true;
}
}
//ClosedList class
function ClosedList()
{
var cells=[];
this.add=function(cell)
{
cell.list="closed";
cells.push(cell);
}
this.contains=function(cell)
{
return cells.indexOf(cell)<0?false:true;
}
}
//init
var open_list=new OpenList();
var closed_list=new ClosedList();
var ctx=map.ctx;
open_list.add(map.cells[map.origin.x][map.origin.y]);
this.ended=false;
this.iterations=0;
//members
this.next=function(skip_render)
{
if(this.ended)
return;
this.interations++;
//get the first cell
var dad=open_list.getFirst();
closed_list.add(dad);
//add the adjacents cells to the open list
var adjacent_cells=map.getAdjacentCells(dad);
for(var i=0;i<adjacent_cells.length;i++)
{
var cell=adjacent_cells[i];
//~~~ Start check end
if(cell.x==map.destiny.x && cell.y==map.destiny.y)
{
this.ended=true;
cell.dad=dad;
if(!skip_render)
this.drawPath(cell);
return cell;
}
//~~~ End check end
//~~~ Start of the exclusion zone
if(!cell.terrain.awkwardness)
continue;
if(closed_list.contains(cell))
continue;
if(open_list.contains(cell))
{
var awk=cell.terrain.awkwardness;
//Change the dad and G,H,F if the current path is better
var newG=parseInt(cell.x!=dad.x && cell.y!=dad.y? dad.G+14/awk : dad.G+10/awk);
if(cell.G<newG) //worse? ok, skip
continue;
}
//~~~ End of the exclusion zone
one_change_at_least=true;
cell.dad=dad;
//Length to the origin
var awk=cell.terrain.awkwardness;
cell.G=Math.round(parseInt(cell.x!=dad.x && cell.y!=dad.y? dad.G+14/awk : dad.G+10/awk));
//Manhattan heuristic
var dx=Math.abs(map.destiny.x-cell.x);
var dy=Math.abs(map.destiny.y-cell.y);
cell.H=(dx+dy)*10;
//Update F
cell.F=cell.G+cell.H;
open_list.add(cell);
}
//sort open list
open_list.sort();
//render
if(!skip_render)
map.render();
}
this.drawPath=function(cell)
{
var offset=map.cell_size/2;
var next=cell.dad;
ctx.save();
while(next)
{
ctx.moveTo(cell.x*map.cell_size+offset,cell.y*map.cell_size+offset)
ctx.lineTo(next.x*map.cell_size+offset,next.y*map.cell_size+offset);
ctx.stroke();
cell=next;
next=cell.dad;
}
ctx.restore();
}
this.solve=function()
{
var last_cell=0x0;
while(!this.ended)
last_cell=this.next(true);
map.render();
this.drawPath(last_cell);
}
}
En estas 300 líneas (me ha llevado media mañana escribirlas!) tenéis todo lo necesario para crear mapas y resolver caminos. Un ejemplo de ejecución (el que crea el último mapa grande que hemos visto) sería:
var map=new Map(30,15,50,canvas);
map.fill(map.terrains.ground)
map.rect(map.terrains.wall, 4, 2, 2, 6);
map.rect(map.terrains.water, 8, 0, 4, 15);
map.rect(map.terrains.deep_water, 9, 0, 2, 15);
map.rect(map.terrains.forest, 13, 6, 5, 5);
map.rect(map.terrains.water, 15, 1, 4, 4);
map.rect(map.terrains.deep_water, 16, 2, 2, 2);
map.rect(map.terrains.wall, 19, 3, 1, 6);
map.rect(map.terrains.bridge, 8, 10, 4, 1);
map.origin={x:2,y:2};
map.destiny={x:27,y:4};
map.render();
var pathfinding=new Pathfinding(map);
//Para avanzar un paso pathfinding.next();
//Para resolver directamente pathfinding.solve();
He de decir que he disfrutado mucho escribiendo este pequeño código. Mi parte favorita son las líneas de las 26 a las 31. ¿Todo el mundo las entiende y sabe qué hacen y por qué funcionan? 😉
Si te gusta esta entrada... compártela! 😉

 0
0 0
0 0
0 0
0 0
0 0
0
Me lo quedo, con tu permiso, para hacer ejercicios y experimentos, nunca me atreví a estudiar el problema por mi cuenta, por pereza, pero así da gusto 🙂
Esa funcion para indexar los tipos de terreno simplemente genial! Aunque si te digo la verdad no entiendo muy bien porqué puedes hacer map.terrains, simplemente con la línea “map.terrains={};” creas la propiedad “terrains” dentro de la variable map?
Exacto! 😉 Dentro de la clase hay una variable “terrains” que contiene los tipos de terreno, y también un miembro “terrains” que contiene los alias a los tipos de terreno (y se crea en el momento en que sea usa, como bien dices). Al primero se accede simplemente por el nombre “terrains”, y al segundo por this.terrains o por map.terrains (y desde fuera con el nombre_del_objeto.terrains?.
Una de las cosas que más molan de javascript es que puedes añadir atributos y métodos a un objeto (o a una clase) en cualquier momento. Por ejemplo:
function A(x) { this.x=x; } var a=new A(1); var b=new B(2); b.y=7; /* Ahora el objeto "b" tiene tiene dos atributos "x" e "y", pero el objeto "a" sólo tiene a X. */El objeto B pertenece ahora a una “subclase” de A creada y definida en tiempo de ejecución. Esta característica de Javascript fue durante muchos años un lastre para el rendimiento de sus máquinas virtuales, hasta que llegó Google con su V8 y logró una buena implementación: https://developers.google.com/v8/design
Para usarlo en un entorno real, convendría añadir la posibilidad de definir un callback cuando se encuentra el camino, otro callback si no se encuentra, etc. StormByte me preguntó en Twitter qué pasaba si no se encuentra ningún camino; le dije que la lista abierta se quedaría vacía y no se haría nada (pero me dí cuenta entonces que el atributo ended se quedaría a false; quizá sería mejor que ended se llamase “found” y crear un nuevo atributo ended que indicase el fin del algoritmo (con éxito o no).
Da mucho juego esa posibilidad, la de poder crear atributos “al vuelo” en una clase que solo tenga ciertos atributos en condiciones concretas, sin cargar al resto de instancias de clase con atributos que nunca llegan a usar, por poner un ejemplo sencillo, un enemigo que puede ser envenenado pero no necesariamente todos los enemigos van a ser envenenados.
Cierto es que siempre(?) merece la pena “acorralar” con callbacks todas las posibilidades, aunque según en que casos, se me ocurre un escenario en el que los caminos son dinámicos, y no sé si, en el caso de que en primera instancia no se encuentre ningún camino, pero a lo largo del tiempo un cambio en el mapa abra un camino posible, es mejor parar la función y reiniciarla o dejarla correr hasta que pueda encontrar un camino posible.
De todas formas solo puedo conjeturar porque no sé mucho de optimización (sin contar las muchísimas otras cosas que aún me quedan por aprender sobre programación en general), y me muevo bastante por intuición. Pero, como bien dices al principio de la entrada, las personas tendemos a reafirmar nuestra lógica en lugar de compararla y mejorarla, por eso es algo que intento evitar siempre a toda costa, y preguntarte sobre estas cosas garantiza ir bien encaminado 😉
Hola! de todos los tutoriales que he leído en internet, el suyo es uno de los mejores.Estoy tratando de implementar el “Pathfinding” en RPG Maker 2003, que por desgracia, no es posible desarrollar una programación que las demás lenguas que conocemos.Pero, con las variables del sistema y sus pruebas de “condiciones”, sabemos que es posible implementar el Pathfinding en RPG Maker 2003.Mi problema es que : cuando dos nodos tienen exactamente el mismo costo, es decir, el costo más bajo para los viajes, no puedo pensar en un algoritmo que hace que la elección de la mejor manera, como en el ejemplo de la “traza interactivo II”.No sé qué hacer.
Hola Sagat, disculpa la demora en responder, llevo unos meses “fuera del mundo”.
Lo ideal en Inteligencia Artificial es que cuando tienes dos o más soluciones igual de buenas (o igual de malas) elijas una aleatoriamente. Así, si se repiten las condiciones, el resultado será más impredecible y más real.
Por ejemplo, si haces una IA que juegue al ajedrez, es posible que ante un determinado tablero haya 3 o 4 movimientos considerados como los mejores para ese tablero. Si siempre coges el mismo, al jugador le dará la sensación de que la máquina es muy predecible. Sin embargo, si entre todas las condiciones elijes una al azar, la misma partida se desarrollará de forma diferente cada vez.
Muchas gracias, tu artículo ha sido muy aclaratorio, saludos
Hola!!! Muy útil tu artículo, pero la verdad que no doy pié con bola con esto, ya que nadie absolutamente comenta bien en qué momento agrego a la lista “abiertos” las nuevas celdas… antes o después de chequear los nuevos “G”? Cuantas más iteraciones tengo, más confuso se me hace todo… De todas formas tu artículo fue el más útil que encontré en toda la Web… muchas gracias!
Hola Hugo,
Perdona que no haya contestado antes, he estado mucho tiempo sin tener ni un minuto para el blog.
Las celdas se añaden a la lista abierta en el paso E. Había omitido este paso en el resumen del algoritmo, mis disculpas por ellos; error que voy a subsanar inmediatamente.
En el código este paso sí se incluye (línea 276), pero de nuevo, había olvidado incluirlo en el resumen.
Gracias a ti!
Me encontraba repasando algoritmos de grafos que hacía años había visto en la universidad y la verdad que tu enfoque ha sido muy didáctico y claro! Gracias por el aporte a la comunidad! 🙂
Hola, gran artículo, como lo harias para un entorno 3D? En los ejemplos solo vemos un plano 2D visto desde arriba.
Saludos
Gracias Bruno. Para 3D tienes que distinguir 2 casos:
1) Pathfinding en un espacio 3D completo (por ejemplo, un dron volando que puede moverse libremente por todo el espacio). En este caso en vez de dividir el espacio 2D en celdas 2D (un plano en cuadrados, o hexágonos, etc) divides el espacio 3D en celdas 3D (por ejemplo, cubos). Después de eso el algoritmo es exactamente igual, para cada celda (cubo) deberás comprobar las adyacentes (los otros cubos que rodean al cubo actual en 3D) y todo los demás queda igual.
2) El otro caso es un mundo 3D pero con agentes que no pueden “volar” libremente, si no que se desplazan por un plano 2D (como personas caminando). Si en ese mundo hay cuevas o edificios de forma que el mundo consiste en una serie de planos 2D en un mundo 3D, tienes que mapear todos los planos en uno y aplicar el algoritmo exactamente igual que con un plano normal. La forma más sencilla de mapear todos los planos en uno y añadiendo “saltos” de un plano a otro (por ejemplo, la celda de entrada a una cueva tiene como adyacente a la derecha una celda de otro plano que representa la cueva en sí, en vez de la celda que está geométricamente adyacente al plano original).
Es un poco difícil de explicar sin figuras y digramas, pero espero que se entienda!
Hola! muchas gracias por tu respuesta tan rápida, creo lograr entenderte, dibujé un diagrama de como lo entendí, y en ese caso, mi agente tendria que “teletransportarse” de un plano a otro al llegar a la casilla que es la entrada al otro plano (la dejé marcada) Es correcto?
http://prntscr.com/g27gbl
Saludos
Eso es, exactamente. Además hay una pequeña complicación extra, y es que ciertas casillas no son accesibles desde algunas de sus adyacentes (porque están a diferente altura). En vez de contemplar directamente todas las adyacentes, hay que añadir información extra para especificar desde qué casillas se pueden acceder a cuáles otras*.
* a esto se le puede dar una vuelta de tuerca más, añadiendo también además de la dirección el sentido de acceso (por ejemplo, se puede saltar de arriba a bajo, pero no escalar de abajo a arriba).
Hola! Ya hice funcionar el codigo en un plano 2D en C#, ahora voy a hacer la parte de dividir mi mundo 3D en planos y hacer que funcione en alturas, en el caso de la complejidad extra no es problema puesto que mi personaje no podria saltar de un bloque a otro, la unica manera de subir o bajar es a través de escaleras.
Cuando tenga todo listo te comento.
Saludos y gracias
Hola! lo logré aqui puedes ver el resultado, al final lo que hice fue crear una matriz de nodos tridimensional y al momento de verificar los vecinos, en vez de hacerlo en 1 solo eje, lo estoy haciendo en los 3 como si fuese un cubo. He aqui el video https://www.youtube.com/watch?v=NQtdR3eCdUg&feature=youtu.be